อนุสิทธิบัตร
ชุดล้อนำทางสำหรับรถขนส่งผู้โดยสารอัตโนมัติดัดแปลงแบบไร้คนขับ
- ชื่อผู้ประดิษฐ์ ผู้ช่วยศาสตราจารย์ ดร.ชัยยุทธ์ สัมภวะคุปต์, อ. ดร.สุนทร โอษฐงาม
- หน่วยงาน วิทยาลัยเทคโนโลยีอุตสาหกรรม, วิทยาลัยเทคโนโลยีอุตสาหกรรม
- เบอร์โทรภายใน 6427
- Email chaiyut.s@cit.kmutnb.ac.th, soontorno@kmutnb.ac.th
รายละเอียดผลงาน
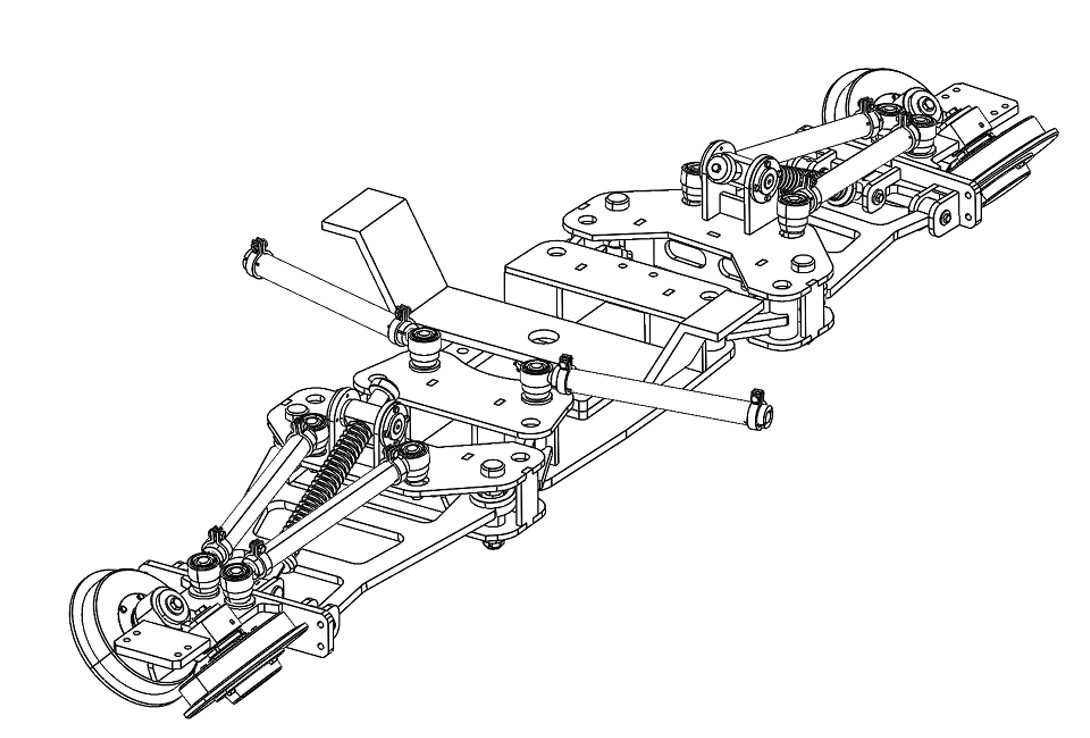
ชุดล้อนำทางสำหรับรถขนส่งผู้โดยสารอัตโนมัติดัดแปลงแบบไร้คนขับ เป็นการออกแบบให้ใช้งานกับรางเครน ประกอบไปด้วย 4 ส่วน คือ ส่วนชุดล้อลูกกลิ้ง (Roller) ทำหน้าที่จับยึดรางนำทางไม่ให้ชุดล้อลูกกลิ้งหลุดออกจากกัน และบังคับทิศทางไปบนราง ส่วนสปริงกดชุดลูกกลิ้ง (Suspension) ทำหน้าที่กดล้อลูกกลิ้งให้ติดกับรางตลอดเวลา และป้องกันการกระแทกระหว่างรางนำทางกับลูกกลิ้ง ส่วนก้านต่อบังคับเลี้ยว (Steering linkage) ทำหน้าที่ส่งถ่ายการเคลื่อนที่จากล้อลูกกลิ้งไปยังล้อยางในการบังคับมุมของล้อยาง และส่วนฐานจับยึดระบบบังคับเลี้ยว (Subport) ทำหน้าที่จับยึดชุดล้อนำทางเข้ากับเพลาขับเคลื่อนของรถขนส่งผู้โดยสาร ชุดล้อนำทางนี้เป็นการประยุกต์ใช้งานกับรถขนส่งผู้โดยสารสาธารณะเก่าให้สามารถนำกลับมาใช้ใหม่โดยไม่ต้องพึ่งพาผู้ขับขี่